Download here
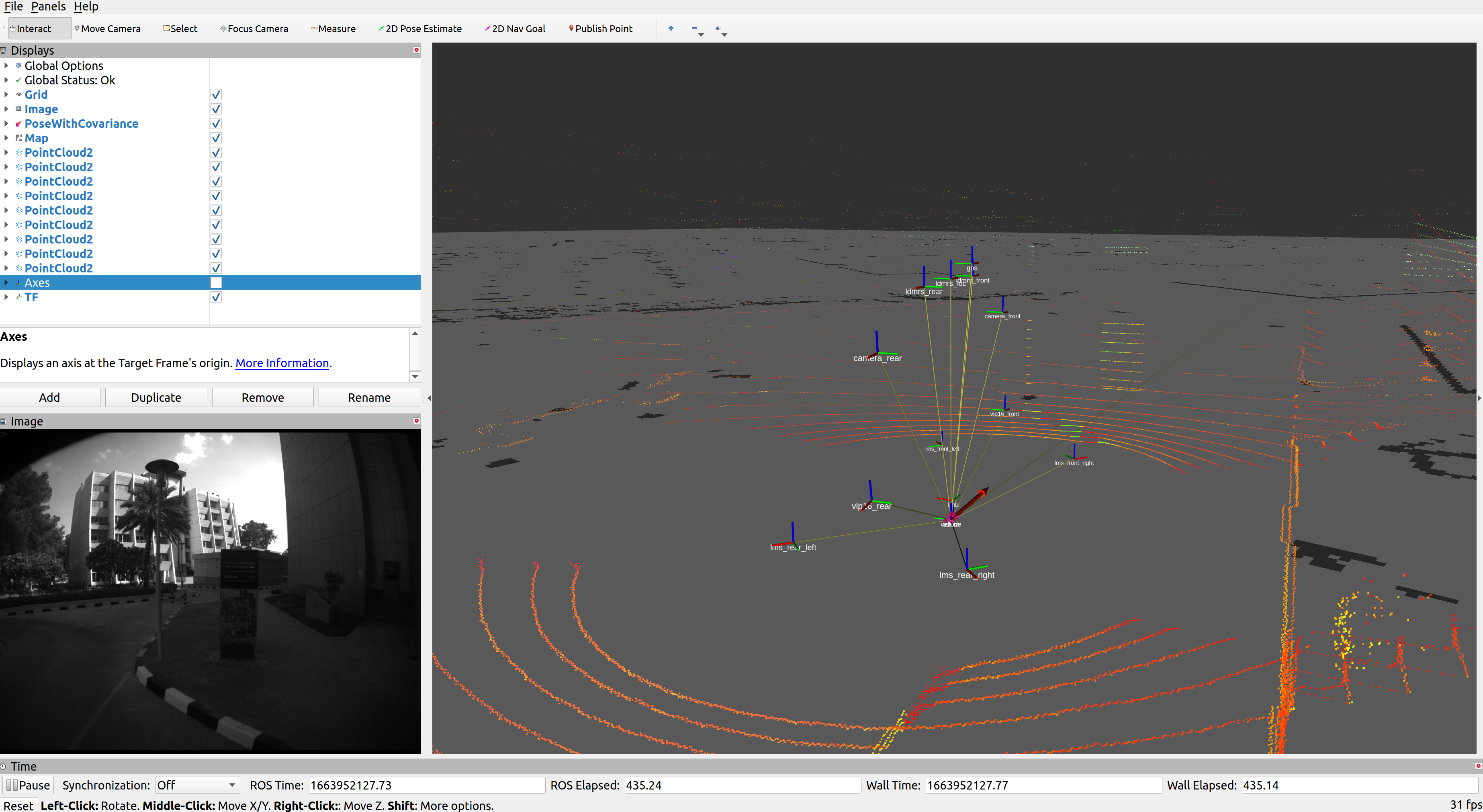
The dataset includes around twenty minutes of unlabeled data (A set of 8 LiDARs, Monochrome Cameras, IMU, GPS) captured from an autonomous shuttle deployed in Khalifa University, SAN Campus, UAE. The vehicle is driving autonomously in a mixed traffic site inside the university campus, featuring different types of vehicles (sedans, SUVs, buses) as well as pedestrians on sidewalks, crossings, and on the road. Data is provided in a rosbag format, with all transforms between sensors recorded.
Table I: Topics and datatypes
| Topic Name | # of Messages | Message Type |
|---|---|---|
| /camera_front_acquisition_details | 10532 | rds_msgs/camera_acquisition_details |
| /camera_front_compressed | 10531 | sensor_msgs/CompressedImage |
| /camera_front_mono | 10531 | sensor_msgs/Image |
| /cameras/groups/all/sw_trigger | 10653 | std_msgs/Empty |
| /fusion_pose | 106312 | geometry_msgs/PoseWithCovarianceStampe |
| /gps/raw_messages_onchanged | 7 | std_msgs/UInt8MultiArray |
| /gps/raw_messages_ontime | 10652 | std_msgs/UInt8MultiArray |
| /gps_bestpos | 5326 | rds_msgs/msg_novatel_bestpos |
| /gps_gpgst | 5326 | rds_msgs/msg_novatel_gpgst |
| /gps_origin | 1 | rds_hal_msgs/gps_origin |
| /gps_position | 5326 | rds_msgs/localization_gnss |
| /gps_position_horizontal | 5326 | rds_msgs/localization_gnss |
| /ldmrs_pose | 26697 | rds_msgs/localization_lidar |
| /map_ldmrs | 40 | nav_msgs/OccupancyGrid |
| /measure_odometry_corrected | 52788 | rds_msgs/odometry_car |
| /mti_node/imu/data | 106532 | sensor_msgs/Imu |
| /mti_node/imu/data_corrected | 106437 | sensor_msgs/Imu |
| /mti_node/imu/data_corrections | 2131 | sensor_msgs/Imu |
| /mti_node/imu/data_horizontal | 106391 | sensor_msgs/Imu |
| /rosout | 2 | rosgraph_msgs/Log |
| /rosparam_dump | 1 | std_msgs/String |
| /scan_ldmrs | 26801 | sensor_msgs/PointCloud2 |
| /scan_ldmrs_front | 26627 | sensor_msgs/PointCloud2 |
| /scan_ldmrs_front/raw | 26634 | rds_msgs/RawScan |
| /scan_ldmrs_horizontal | 26793 | sensor_msgs/PointCloud2 |
| /scan_ldmrs_loc | 26697 | sensor_msgs/PointCloud2 |
| /scan_ldmrs_rear | 26625 | sensor_msgs/PointCloud2 |
| /scan_ldmrs_rear/raw | 26634 | rds_msgs/RawScan |
| /scan_lms_front_left | 26613 | sensor_msgs/PointCloud2 |
| /scan_lms_front_left/raw | 26621 | rds_msgs/RawScan |
| /scan_lms_front_right | 26624 | sensor_msgs/PointCloud2 |
| /scan_lms_front_right/raw | 26634 | rds_msgs/RawScan |
| /scan_lms_rear_left | 26599 | sensor_msgs/PointCloud2 |
| /scan_lms_rear_left/raw | 26607 | rds_msgs/RawScan |
| /scan_lms_rear_right | 26627 | sensor_msgs/PointCloud2 |
| /scan_lms_rear_right/raw | 26634 | rds_msgs/RawScan |
| /scan_vlp16_front | 10651 | sensor_msgs/PointCloud2 |
| /scan_vlp16_front/raw | 21307 | rds_msgs/RawScan |
| /scan_vlp16_rear | 10649 | sensor_msgs/PointCloud2 |
| /scan_vlp16_rear/raw | 21306 | rds_msgs/RawScan |
| /tf | 250463 | tf2_msgs/TFMessage |
| /tf_corrections | 1065 | geometry_msgs/TransformStamped |
| /vehicle_acceleration | 106436 | geometry_msgs/AccelWithCovarianceStamped |
| /vehicle_pose | 106309 | geometry_msgs/PoseWithCovarianceStamped |
| /vehicle_velocity | 106796 | geometry_msgs/TwistWithCovarianceStamped |