![]()
AVLite
Autonomy, made lite¶
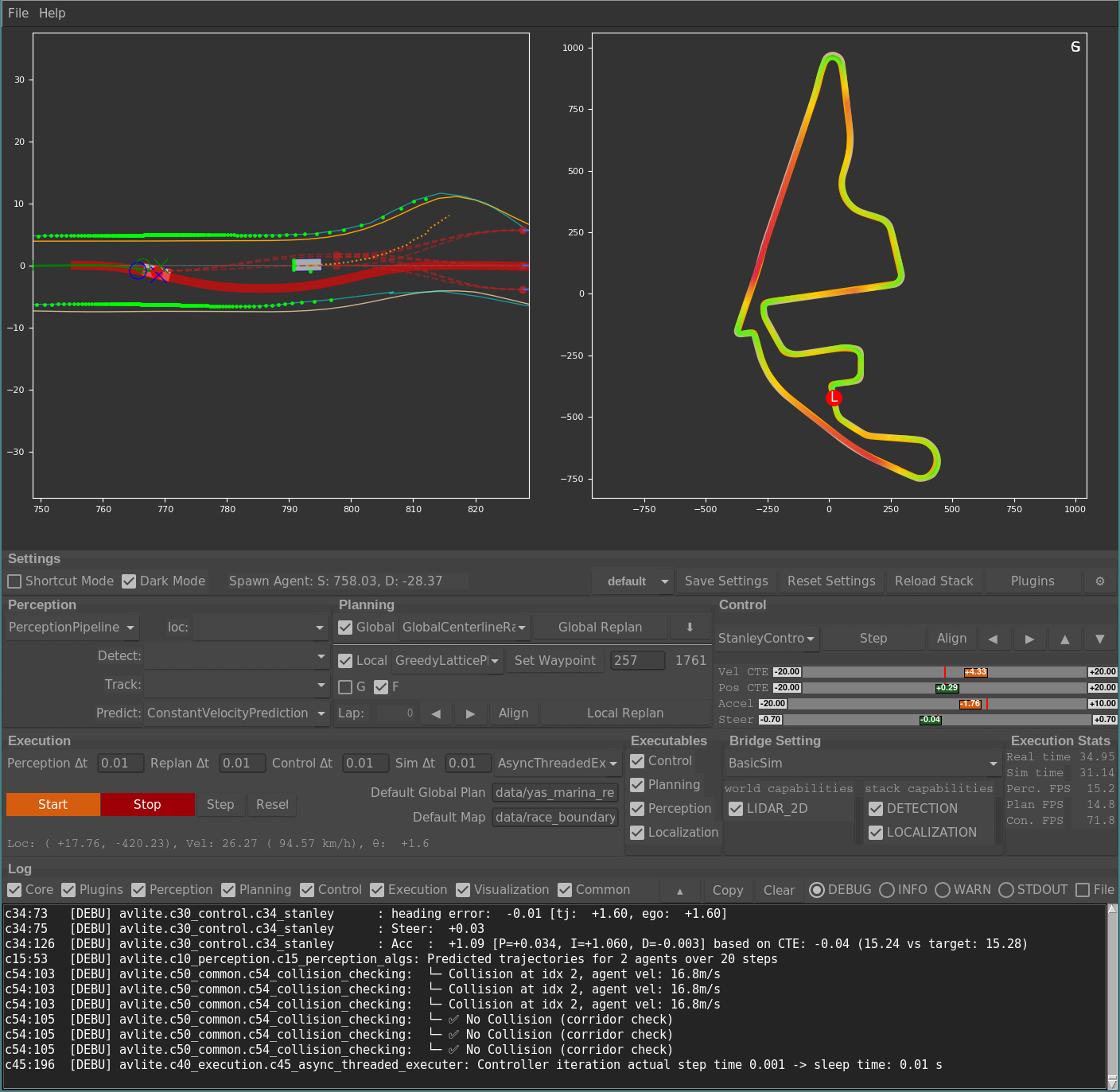
AVLite is a lightweight, modular autonomous-vehicle stack — from a 2D simulator on your laptop to headless deployment on a real robot. Swap classic perception, planning, and control modules, or plug in an end-to-end system.
Get Started Overview Community GitHub



BasicSim included · CARLA / Gazebo / ROS2 ready · End-to-end plugins · GUI + headless · pause / step / interactive debug · Pure Python
-
Quick Start
Install, launch the visualizer, and drive the built-in simulator in minutes.
-
Architecture
Capability-driven composition: omit any module, or run sensors→plan / sensors→control end-to-end.
-
Algorithms
Global and local planning, including a greedy Frenet lattice planner.
-
Plugin System
Add perception, planning, control, world-bridge, or
TaskStrategyexecution tasks as plugins. -
Community Plugins
Browse community-built bridges, controllers, and predictors — with live GitHub stats.
-
Execution Tasks
Orthogonal extension of the running stack — mission, supervision, instrumentation around a stable pipeline.
-
Configuration
YAML profiles with schema validation, tooltips, and import/export.
-
Full Overview
Features, installation, components, and configuration in one place.
Why AVLite¶
-
Lightweight
The core stack needs only NumPy, Matplotlib, SciPy, Shapely, NetworkX, and Pydantic. No middleware lock-in.
-
Modular
Swap perception, localization, planning, and control strategies at runtime — they auto-register and appear in the UI.
-
Sim to robot
The same YAML profile drives the GUI and headless mode, so what you see in the visualizer is what the robot runs.
-
Multi-simulator
BasicSim ships built in; CARLA, Gazebo, and ROS2 plug in through optional world-bridge plugins.